- 棉紡
- 紡織原料
- 開(kāi)清棉
- 梳棉
- 精梳
- 并條
- 粗紗
- 細(xì)紗
- 絡(luò)并捻
- 紡紗
- 環(huán)錠紡
- 轉(zhuǎn)杯紡
- 噴氣紡
- 渦流紡
- 摩擦紡
- 緊密紡
- 假捻變形
- 空氣變形
- 熱流變形
- 多重變形
- 織造
- 整經(jīng)
- 漿紗
- 穿結(jié)經(jīng)
- 卷緯
- 開(kāi)口
- 引緯
- 打緯
- 卷取
- 送經(jīng)
- 織機(jī)傳動(dòng)
- 織造工藝
- 織機(jī)
- 劍桿織機(jī)
- 噴氣織機(jī)
- 噴水織機(jī)
- 片梭織機(jī)
- 片梭織機(jī)
- 多臂裝置
- 提花裝置
- 折入邊裝置
- 針織
- 緯編
- 織襪
- 經(jīng)編
- 染整
- 前處理
- 染色
- 印花
- 后整理
- 染化料
- 測(cè)試
- 環(huán)保
- 化纖
- 人造纖維
- 合成纖維
- 化纖設(shè)備
- 無(wú)紡
- 干法成網(wǎng)
- 濕法成網(wǎng)
- 紡絲成網(wǎng)
- 針刺加固
- 熱粘合
- 化學(xué)粘合
- 熔噴工藝
 您所在的位置:
您所在的位置:





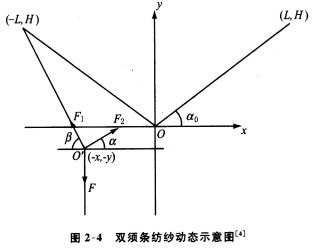
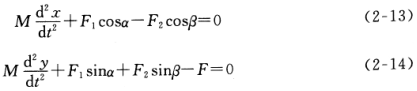
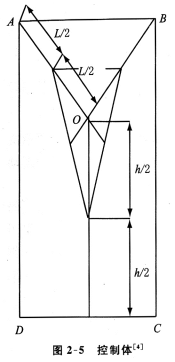
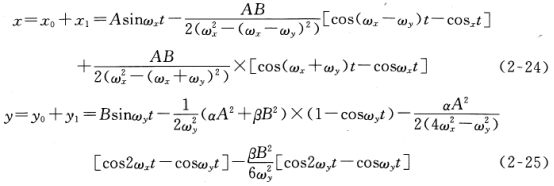
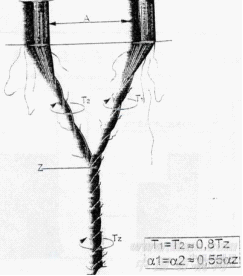 雙須條紡紗時(shí),只要匯聚點(diǎn)處的加捻平衡受到干擾,在紗線形成時(shí),須條捻度被捕獲。即使在普通的雙須條成紗過(guò)程中(即加捻平衡無(wú)抖動(dòng)),由于須條中的粗、細(xì)節(jié)和紡紗張力存在連續(xù)隨機(jī)變化,這導(dǎo)致加捻平衡有細(xì)微抖動(dòng),因此,須條捻度也會(huì)發(fā)生相對(duì)較少的隨機(jī)變異。已表明,加捻平衡的周期性抖動(dòng),能導(dǎo)致須條捻度相當(dāng)大的變化。Emmanuel等[2]給出了賽絡(luò)紡的理論模型,包括:
雙須條紡紗時(shí),只要匯聚點(diǎn)處的加捻平衡受到干擾,在紗線形成時(shí),須條捻度被捕獲。即使在普通的雙須條成紗過(guò)程中(即加捻平衡無(wú)抖動(dòng)),由于須條中的粗、細(xì)節(jié)和紡紗張力存在連續(xù)隨機(jī)變化,這導(dǎo)致加捻平衡有細(xì)微抖動(dòng),因此,須條捻度也會(huì)發(fā)生相對(duì)較少的隨機(jī)變異。已表明,加捻平衡的周期性抖動(dòng),能導(dǎo)致須條捻度相當(dāng)大的變化。Emmanuel等[2]給出了賽絡(luò)紡的理論模型,包括: 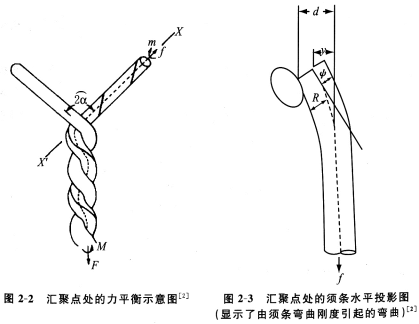













源經(jīng)編.gif)
